مقاله آزمایشگاه سیستمهای کنترل خطی
مقدمه
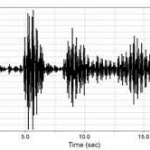
مقاله آزمایشگاه سیستمهای کنترل خطی در این مرحله ازآزمایش ابتدا یک موج مربعی به ورودی انتگرالگیر میدهیم و از خروجی یک موج مثلثی میگیریم ؛ وبه کمک رابطه مربوطه Ti را محاسبه میکنیم.از آنجا که انتگرال یک سیکل کامل صفر میشود(سطح زیر منحنی ) بنابراین انتگرال را در نیم سیکل محاسبه می کنیم .حال خروجی که با فرکانس ۱۰۰ هرتز و ولتاژ ۲ ولت پیک تا پیک تنظیم شده است را به ورودی انتگرالگیر میدهیم و ورودی و خروجی را به طور همزمان در اسکوپ مشاهده میکنیم. چون در این حالت انتگرالگیر به اشباع میرود توسط set value مقدار DC به آن اضافه میکنیم تا از اشباع خارج شود……
بنابراین در این مطلب از فروشگاه مارکت فایل به ارائه آزمایشگاه سیستمهای کنترل خطی در قالب 62 صفحه میپردازیم.
فهرست مطالب
آشنایی با دستگاه شبیه ساز فرآیند: ۵
۱-۱)Set value: ۵
۲-۱)Disturbance: ۵
۳-۱) انتگرال گیر: ۵
۴-۱) مشتقگیر: ۷
۶-۱)آزمایش PSEUDO : ۸
۷-۱)بررسی پاسخ فرکانسی : ۸
آزمایش شماره (۲): ۱۰
آشنایی با قسمت Process دستگاه شبیه ساز فرآیند: ۱۰
آشنایی با سیستم مرتبه اول : ۱۲
نمودار مکان هندسی سیستم فوق برابر است با: ۱۷
ونمودار قطبی آن چنین میباشد: ۱۸
آزمایش شماره(۳): ۱۹
آشنایی با سیستم های مرتبه دوم : ۱۹
آزمایش شماره (۴): ۳۲
آشنایی با سیستم های مرتبه سوم : ۳۲
۲-۱) پاسخ زمانی: ۳۶
سیستم حلقه باز : ۳۷
۲-۲ ) پاسخ فرکانسی : ۳۸
آزمایش شماره (۵): ۳۹
بررسی اثر افزودن صفروقطب به سیستم مرتبه دوم : ۳۹
ج– افزودن صفر به سیستم مرتبه دوم مدار باز ۴۱
د – افزودن صفر به سیستم مرتبه دوم مداربسته: ۴۲
آزمایش شماره (۶) : ۴۵
بررسی اثر نویزواغتشاش بر سیستم مرتبه اول : ۴۵
الف- بررسی اثر نویز: ۴۵
ب- بررسی اثر اغتشاش: ۵۱
آزمایش شماره (۷): ۵۴
آشنایی با کنترل کننده های PI,PD, PID : ۵۴
پاسخ فرکانسی کنترل کننده PD : ۵۷
ب- کنترل کننده PI ۶۰
خواص PI یا کنترلر تناسبی انتگرالی در حالت کلی : ۶۰
پاسخ فرکانسی کنترل کننده PI : ۶۳
محاسبه فرکانس شکست : ۶۳
آزمایش شماره (۸): ۶۶
آشنایی با کنترل کننده های فرکانسی : ۶۷
الف- کنترلر پیش فاز(:(phase-lead ۶۷
مراحل طراحی کنترلر پس فاز………..
۳-۱) انتگرال گیر:
مراحل طراحی کنترلر پس فاز:
مکان هندسی سیستم جبران نشده را رسم میکنیم .با استفاده از مشخصات عملکردی مطلوب محل قطب های مطلوب را بدست می آوریم .گین سیستم را در موقعیت قطب های مطلوب محاسبه می کنیم و در این نقطه ثابت خطای سیستم را هم محاسبه میکنیم .ثابت خطای سیستم جبران نشده را نسبت به ثابت های خطای مطلوب بدست می آوریم ؛ وبا توجه به این مقدار ، مقدار افزایشی را که باید در گین سیستم اتفاق بیفتد ؛ محاسبه می شود .صفر کنترلر را در یک نقطه نزدیک مبدا قرار می دهیم و قطب کنترلر را با توجه به نسبت ثوابت خطای بدست آمده ، می یابیم ………..