مقاله طراحی وساخت ربات دو درجه آزادی SCARA-2R
چکیده مقاله:
مقاله طراحی وساخت ربات دو درجه آزادی SCARA-2R استفاده از ربات ها در دنیای امروز و خاصه در صنعت به طور روز افزونی در حال افزایش میباشد . در این مقاله طراحی و ساخت یک ربات دو در جه آزادی SCARA -2R با استفاده از ویژگیهای خاص موتور های پله ای و معادلات سینماتیک معکوس، جهت حرکت روی مسیر دلخواه در یک صفحه شرح داده شده است . این ربات قادر است روی مسیرهایی که از قبل توسط کاربر تعیین شده اند، حرکت نماید . بر این اساس در انتهای مقاله جهت نشان دادن میزان دقت حرکت ربات، مقایسه ای بین مسیر واقعی طی شده توسط ربات و مسیر خواسته شده صورت گرفته است
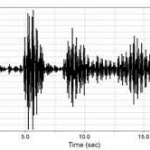
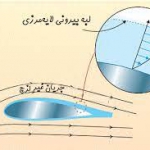
این مطلب از فروشگاه مارکت فایل به ارائه تشخيص نشت گاز به روش اكوستيك در قالب 5 صفحه میپردازیم.
کلیدواژه ها:
طراحی – ساخت – ربات صفحه ای – موتور پله ای – سینماتیک معکوس
مقدمه:
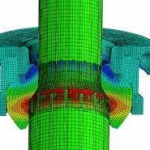
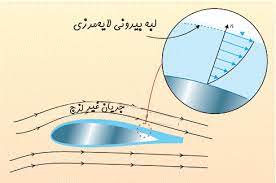
امروزه رباتها در ابعاد گسترده اي در فعاليتهاي صنعتي بکار برده مي شوند استفاده از موتورهاي پله اي در اين رباتهـا با توجه به قابليتهايشان، به طور وسـيعي در حـال افـزايش است. ربات هاي 2R- SCARA از دو بازو بـا دو مفـصل لولايي تشکيل شده اند(شکل ). سيستم حرکتي اين نـوع ربات ها ساد بـوده عمومـا توسـط موتـور هـاي جريـان مستقيم يـا موتـور هـاي پلـه اي حرکـت مـي کننـد . در استفاده از موتور هاي جريان مستقيم به دليل تغييرات غير خطي ولتاژ گشتاور وجود خطاي لغزش، يـک سيـستم کنترل مدار بسته جهت کنترل دقيق موتـور همـواره مـورد…………….
مشخصات نویسندگان
احمد باقری – استادیار گروه مهندسی مکانیک گروه مهندسی مکانیک، دانشگاه گیلان