پروژه سیستم های تشخیص وسایل نقلیه
مقدمه
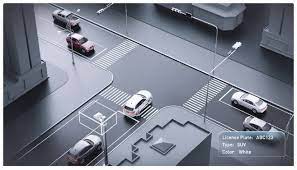
پروژه سیستم های تشخیص وسایل نقلیه در سال های اخیر نظارت بر ترافیک و ایمنی وسایل نقلیه اعم از خودروها ، قطارها ، کامیون ها ، …. مورد توجه کمیته های حمل و نقل هوشمند قرار گرفته است .جهت بررسی سیستم های که ما را به اهداف فوق برساند ، نیاز به تشخیص وسیله ی نقلیه است تا بتوان پردازش ها و اقدامات لازم را به عمل آورد .از طریق روش های فوق ، به کمک یک بانک اطلاعاتی شامل چندین وسیله نقلیه نمونه که از تصاویر واقعی جاده استخراج شده اند ، آزمایشات ویژه و متنوعی بر روی وسایل نقلیه انجام می شود و کارایی هر روش جهت تشخیص صحیح در کوتاه ترین زمان ممکن ثبت می شود و مورد استفاده های بعدی قرار خواهد گرفت .
واژههای کلیدی
تشخیص ، استخراج ، ویژگی های محلی ، وسیله ی نقلیه ، ترافیک ، تطبیق ، تغییر شکل یافتن فوریه ، موج ضربه ای کوچک ، منحنی ضربه ای ، طرح های بازتابشی
بنابراین در این مطلب از فروشگاه مارکت فایل به ارائه سیستم های تشخیص وسایل نقلیه در قالب 80 صفحه میپردازیم.
فهرست مطالب
مقدمه
فصل یکم- تشخیص وسایل نقلیه ی جاده ای در تصاویر دوربینی
نواحی کاندید شده مورد نظر
۱-۱-۱- تشخیص و ردیابی خط
۱-۱-۲- وسایل نقلیه مورد نظر
تشخیص وسایل نقلیه
فصل دوم – سیستم تشخیص وسایل نقلیه مبتنی بر ویژگی های محلی با استفاده از برد بینایی موازی
۲-۱- الگوریتم تشخیص
۲-۱-۱- تکنیک پنجره مشخصه
۲-۱-۲- تکنیک فضای مشخصه
۲-۱-۳- انتخاب مشخصه ی ویژگی
۲-۱-۴- عملیات انتخاب
۲-۲- الگوریتم بردار تدریجی
۲-۳- آزمایشات تشخیص وسایل نقلیه
۲-۳-۱- وسایل نقلیه همراه با موانع جاده ای
۲-۳-۲- تشخیص وسایل نقلیه
فصل سوم – تشخیص اتوماتیک وسایل نقلیه در توالی از تصاویر هوایی با نرخ فریمی پایین
۳-۱- نظارت ترافیک
۳-۲- خط مشی کلی
۳-۳- تشخیص وسیله نقلیه
۳-۳-۱- روند تشخیص
۳-۲-۲- پارامترها ی وسیله نقلیه
۳-۳-۳- تطبیق
۳-۴- ارزیابی تشخیص
۳-۴-۱- طرح ارزیابی
۳-۴-۲- اجرای تشخیص و ردیابی
۳-۴-۳-هماهنگی حرکتی
۳-۴-۴- مقدار نهایی
۳-۵- بررسی الگوریتم
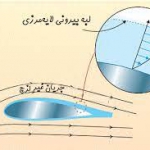
فصل چهارم – تشخیص و مکان یابی وسایل نقلیه جاده ای به طور همزمان بوسیله مدلی مبتنی بر بینایی متمرکز
۴-۱-۲- پردازش مراحل تشخیص و ردیابی
۴-۱-۳- شناسایی جهت تشخیص و توابع هزینه ی آن
۴-۱-۴ – ارزیابی الگوریتم
۴-۲- کاربرد تشخیص و مکان یابی وسایل نقلیه ی جاده ای
۴-۲-۱- مدل سازی شی در دنیای سه بعدی
۴-۲-۲- فازهای یادگیری
۴-۲-۳- تشخیص و توابع هزینه
۴-۲-۴- مکان یابی وسایل نقلیه
۴-۲-۵- ردیابی وسایل نقلیه
فصل پنجم – تشخیص وسایل نقلیه با استفاده از یادگیری با ناظر
۵-۱- طرح کلی مدل پیشنهادی
۵-۲- بهبود تابع تشخیص نمایی اصلاح شده (ام کیو دی اف)
۵-۳- آزمایشات انجام شده
فصل ششم- تشخیص وسایل نقلیه مبتنی بر تغییر شکل های فوریه ، موج ضربه ای کوچک و منحنی ضربه ای
۶-۱- استخراج ویژگی
۶-۱-۱- تغییر شکل یافتن فوریه
۶-۱-۲-تغییر شکل یافتن از طریق موج ضربه ای کوچک
۶-۱-۳- تغییر شکل یافتن از طریق منحنی ضربه ای
۶-۱-۴- طبقه بندی
۶-۲- نتایج آزمایشات
۶-۲-۱-آنالیز تطبیقی توصیف گر فوریه ای، موج ضربه ای و منحنی ضربه ای
۶-۲-۱-۱- تغییر شکل فوریه ای
۶-۲-۱-۲- تغییر شکل موج ضربه ای
۶-۲-۱-۳- تغییر شکل منحنی ضربه ای
۶-۲-۲- کاهش ابعاد بردارهای مشخصه(عوامل مشترک فوریه ،موج ضربه ای ومنحنی ضربه ای)
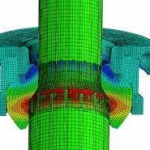
فصل هفتم – مدل تغییر پذیر عمومی برای تشخیص وسایل نقلیه
۷-۱- مدل پارامتریزه شده
۷-۲- جمع آوری اطلاعات
۷-۳- پایداری ساختار بهبود یافته
۷-۴- تجزیه و تحلیل اجزای اصلی
فصل هشتم – تشخیص واگن های ریلی در طرح های بازتابشی
۸-۱- تشخیص سیگنالی
۸-۱-۱- روش کار
۸-۱-۳- توضیح سناریو
۸-۱-۴- روش انجام آزمایش
۸-۲- تئوری تشخیص سیگنالی
۸-۳- آزمایش فاصله ی تشخیص
۸-۳- ۱ روش کار
۸-۳-۲- طراحی آزمایش
۸-۳-۳- توضیح سناریو
۸-۳-۴- روش انجام آزمایش
نیتجه گیری
منابع و مآخذ……
منابع و مآخذ
[۱] A. Mohan, C. Papageorgiou, and T. Poggio, “Example-based object detection in images by components,” IEEE Transactions on Pattern Analisis and Machine Intelligence, Vol. 23, No. 4, April 2001.
[۲] A. Shashua, Y. Gdalyahu, and G. Hayun, “Pedestrian detection for driving assistance systems: single-frame classification and system level performance,” In Proc. IEEE Intelligent Vehicles Symposium, pp. 1-6, Parma, Italy, June 14-17, 2004.
[۳] Carroll, A., Multer, J., Williams, D. and M. Yaffee, (1999). Safety of Highway-Railroad GradeCrossings: Freight Car Reflectorization. Report No. DOT/FRA/ORD-98/11, Washington,DC: U.S. Department of Transportation, Federal Railroad Administration.
[۴] C. Papageorgiou and T. Poggio, “A trainable system for object detection” . Intl J.Computer Vision, Vol. 38, No. 1, pp. 15-33, 2000.
[۵] Chapuis R. Chausse F., Trujillo N and Naranjo M. Object recognition by model based focused vision. 2004.